
When Will Self-Driving Cars
Dominate Our Roads?
By
Steven Shwartz
Autonomous vehicle developers like Tesla and Waymo have made tremendous progress towards self-driving vehicles. However, there are two issues that may significantly delay the ubiquitous rollout of autonomous vehicles.
The Big Issue: Edge Cases
In 2009, Captain Sully Sullenberger had just piloted his plane into the air when a flock of Canadian geese took out the engines. The plane was only 2,900 feet above the ground, and the pilots had only a few minutes to maneuver before the plane would hit the ground. They had received no training on this specific scenario other than to apply a few basic rules and apply their common sense. To decide the best course of action, they factored in the likelihood of their passengers surviving various crash alternatives, the likelihood of injuring people on the ground, where rescue vehicles would be quickly available, and many other factors. Then they heroically landed in the Hudson River, all 155 passengers survived, and no one was hurt [1].
Pilots receive extensive training, but it is impossible to train them for every possible situation. For those edge cases, they must use their commonsense knowledge and reasoning capabilities.
The same is true for automobile drivers. A Clearwater Florida high school student noticed a woman having a seizure while her car was moving. The student pulled her car in front of the woman’s car and stopped it with no injuries and only minor bumper damage.
Most of us have encountered unexpected phenomena while driving: A deer darts onto the highway. A flood makes the road difficult or impossible to navigate. A tree falls and blocks the road. The car approaches the scene of a car accident or a construction zone. A boulder falls onto a mountain road. A section of new asphalt has no lines. You notice or suspect black ice. Drivers are fishtailing, trying to get up an icy hill. We all have our stories.
People do not learn about all these possible edge cases in driving school. Instead, we use our commonsense reasoning skills to predict actions and outcomes. If we hear an ice cream truck in a neighborhood, we know to look out for children running towards the truck. We know that when the temperature is below 32 degrees and there is precipitation on the road, and we are going down a hill that we need to drive very slowly. We change our driving behavior when we see the car in front of us swerving, knowing that the driver might be intoxicated or texting. If a deer crosses the road, we are on the lookout for another deer because our commonsense knowledge tells us they travel as families. We know to keep a safe distance and handle passing a vehicle with extra care when we see a truck with an “Extra Wide Load” sign on the back. When we see a ball bounce into the street, we slow down because a child might run into the street to chase it. If we see a large piece of paper on the road, we know we can drive over it, but if we see a large, shredded tire, we know to stop or go around it.
Without commonsense reasoning capabilities to handle these unanticipated situations, AV manufacturers have only two choices for these unexpected phenomena. They can try to collect data on human encounters with every one of these rare phenomena and use machine learning to build systems that can learn how to handle each of these phenomena. Alternatively, they can try to anticipate every possible scenario and create a conventional program that takes as input vision system identification of these phenomena and tells the car what to do in each situation.
What will happen when autonomous vehicles encounter unanticipated situations for which there is no training or programming? A scary video taken in 2020 illustrates what can happen. The video shows a Tesla on a Korean highway approaching an overturned truck at high speed in autopilot mode. A man is standing on the highway in front of the truck waving cars into another lane. The Tesla never slows down, the man has to jump out of the way, and the Tesla crashes into the truck at high speed.
Another likelihood is traffic jams. In early 2020, Moscow hosted a driverless vehicle competition. Shortly after the competition began, a vehicle stalled out at a traffic light. Human drivers would reason about this edge case and decide to just go around the stalled car. However, none of the driverless cars did that, and a three-hour traffic jam ensued [2]. We do not want AVs to crash but we also do not want them to stop and block traffic every time they encounter an edge case.
It will be difficult, if not impossible, for manufacturers can anticipate every edge case. It will certainly be easier to do this for slow-moving shuttles on corporate campuses. It is hard to imagine that this is possible for self-driving consumer vehicles that can drive anywhere.
Issue #2: Cars Do Not “See” Like People
Object detection systems represent tremendous victories for deep learning and AI. Unfortunately, deep learning systems make surprising mistakes.
If I train a system to distinguish cats from dogs, and in the training table, all the pictures of dogs are outside, and all the images of cats are inside homes, the deep learning system will likely key in on yard and home features. Then if I show a picture of a dog inside a home, the system will probably label it a cat.

Similarly, in Figure 1 above, before researchers pasted the guitar onto the picture, both object recognition systems and human subjects correctly labeled the monkey in the photo. Adding the guitar did not confuse people, but it made the object recognition system think it was observing a picture of a person instead of a monkey. The object classification system did not learn the visual characteristics that people use to recognize monkeys and people. Instead, it learned that guitars are only present in pictures of people.
Other types of mistakes are even more concerning. A group of Japanese researchers found that by modifying just a single pixel in an image, they could alter an object recognition system’s category choice. In one instance, by changing a single pixel on a picture of a deer, the object recognition system was fooled into identifying the image as a car.
Researchers have also figured out how to fool deep learning systems into recognizing objects such as cheetahs and peacocks in images with high confidence even though there are no objects at all in the image.
Other researchers showed that minor changes to a speed limit sign could cause a machine learning system to think the sign says 85 mph instead of 35 mph and unsafely accelerate as a result. Similarly, some Chinese hackers tricked Tesla’s autopilot into changing lanes. In both cases, these minor changes fooled cars but did not fool people. In real-world driving, many Tesla owners have reported that shadows of tree branches often fool their car into thinking that the shadows are real objects.
When an Uber test car killed a pedestrian in 2018, the car’s object recognition software first classified the pedestrian as an unknown object, then as a vehicle, and finally as a bicycle.
I do not know about you, but I would rather not be on the road as a pedestrian or a driver if vehicles cannot recognize pedestrians with 100% accuracy. What if a self-driving car mistakenly perceives a baby stroller as a low-flying piece of paper? It might drive right through it!
Deep learning system errors also can provide targets for bad actors who might decide to attack deep learning systems. For example, a bad actor might devise ways of confusing cars or trucks into driving off the road.
Autonomous Vehicle Timeline
As tech journalist Doug Newcomb noted [3], the move to driverless cars has a lot in common with the move to “horseless carriages” over a hundred years ago. Back then, we eliminated the horses. Now, we are looking to eliminate the drivers. The one problem with this analogy is that most drivers are smarter than their horses. But most cars are not smarter than their drivers.
The biggest barrier to the ubiquitous rollout of autonomous vehicles is their ability to handle edge cases. Autonomous vehicle manufacturers are hard at work trying to identify all the edge cases and infuse their vehicles with the ability to handle them.
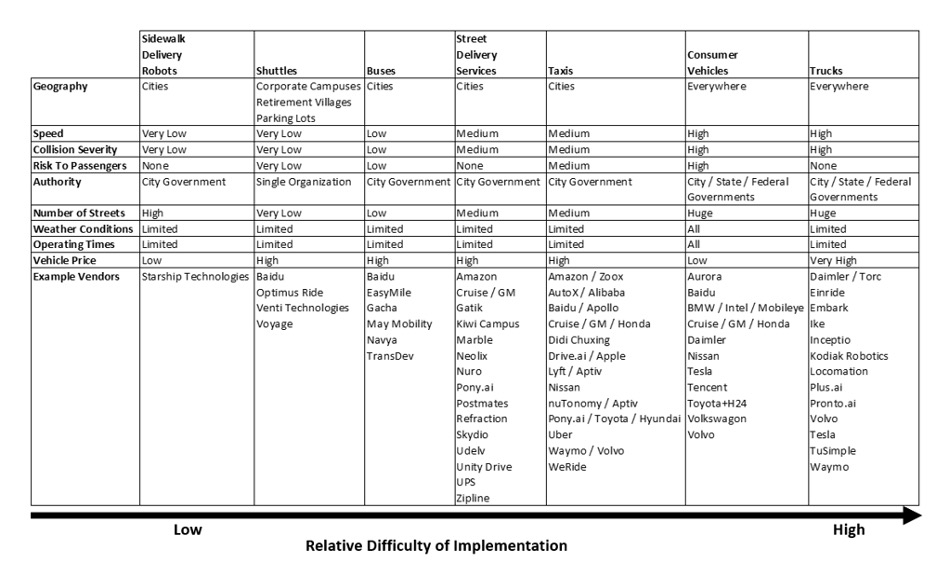
As illustrated in Figure 2, the intended use of the AV technology has a significant impact on the relative difficulty of creating the AV technology. Perhaps the simplest use of AV technology is the development of shuttles that drive fixed routes on private land such as corporate campuses and retirement villages. Because the shuttles retrace the same route over and over, they only need to learn to navigate a small number of routes. Additionally, operators of the vehicles have the option to shut them down in bad weather and operate only during specific times like during the day. In comparison, autonomous consumer vehicles need to learn how to navigate any drivable road, anywhere in the world, under a wide range of weather conditions, and at all hours of the day. More importantly, consumer AVs need to be operable at high speeds where campus shuttles can motor along slowly at speeds as low as five mph. As a result, even if a low-speed shuttle has an accident, the likelihood of severe injury to passengers, pedestrians, and other vehicles is far lower than for a consumer AV. So, consumer AV manufacturers must meet a much more rigorous safety standard than low-speed shuttle developers.
Moreover, the number of potential edge cases increases from left to right in Figure 2 above. Campuses shuttles are likely to encounter relatively few edge cases. Consumer vehicles are likely to encounter so many edge cases that it may be impossible to identify all of them and create AV code to handle them.
AV companies are currently testing the whole range of AVs illustrated in Figure 2. Tests are being conducted in many different US locations and all over the world. Slow-moving shuttles and delivery vehicles will likely be the first to be rolled into production. Their slow speeds minimize the risk of injury and property damage. Because they can be shut down at night or in bad weather, these vehicles will encounter the fewest edge cases. Shuttles have the additional advantage of traveling a fixed route. Also, since they often operate on private land, they are less likely to cause traffic jams.
The Mayo Clinic in Jacksonville, Florida, is testing a driverless shuttle to transport medical potentially contagious medical samples from one part of its campus to another part [4]. EasyMile, a French company, started a test rollout of driverless shuttles with a maximum speed of twelve miles per hour in sixteen US cities.
Nuro is starting to operate tiny pizza and grocery delivery vehicles at speeds up to 25 miles per hour on the roads in Houston, Texas.
We are also seeing tests of self-driving taxis in cities and suburban areas. From 2016 through 2019, Waymo tested driverless taxis in a well-mapped 100 square mile region in the Phoenix suburbs with a safety operator in the vehicle. However, starting in late 2019, Waymo began to offer taxi rides in a vehicle without a safety operator [5] within a 50 square mile sub-region of the Phoenix suburban test area. For safety, the eight cameras in each car are continuously monitored remotely by Waymo staff, who can intervene via remote teleoperation (i.e., remote control). Waymo offers a compelling video of a car driving on public roads without anyone in the driver’s seat [6]. Zoox and other vendors are also testing autonomous taxis in various cities.
Zoox is testing its autonomous taxis in San Francisco. In early 2020, the company posted an impressive video [7] of an autonomous vehicle driving the streets of San Francisco for an hour without the human safety driver taking over at all. The video shows the Zoox car:
- Driving on Market Street when it was very busy with pedestrians
- Stopping for pedestrians in crosswalks and when making turns
- Avoiding pedestrians who walk out from behind parked cars
- Navigating around double-parked cars and delivery trucks
- Going through a tunnel that blocked the GPS signal
- Waiting for a car to back into a spot
- Driving on hilly Lombard Street
That said, there are far more edge cases for city-based taxis than for campus shuttles. If manufacturers somehow manage to identify and program all the edge cases, they will probably need to develop a different system for each city. For example, the edge cases for San Francisco will be different than the edge cases for Bangalore India where it is not unusual to see cattle in the same lanes as cars. I would be surprised to see a major city with only autonomous taxis anytime soon.
On the consumer side, nearly all major auto manufacturers are heading toward autonomous driving capabilities by virtue of their driver assistance offerings. Tesla is the farthest along because it is unobtrusively testing these capabilities on over 825,000+ vehicles. However, no consumer vehicles are close to ready for true autonomous rollout. It is hard to imagine manufacturers capturing enough edge cases for these vehicles to make them safe enough for a driver to read a book during vehicle operation.
The prospect of fully autonomous consumer vehicles is particularly scary. Consumers can drive them anywhere they want, at any time of day, and in any weather conditions. These vehicles will encounter all the edge cases that human drivers encounter. What happens when autonomous consumer AVs encounters new edge cases. They do not have human-like commonsense reasoning skills. How will they respond? Will they cause serious accidents and traffic jams?
Autonomous trucks fall somewhere in between autonomous taxis and consumer vehicles. On the one hand, since trucking is a service, trucking companies could decide to only rollout autonomous trucks on certain stretches of highway. For example, it might be possible to use human drivers or teleoperators to get them on and off the highways. This would reduce the number of edge cases they would encounter. Not operating the trucks in bad weather would further reduce the edge cases.
At the other extreme, autonomous trucks that do all the driving will need to account for perhaps even more edge cases than consumer vehicles. Additionally, they pose far more risk because of their size.
The AV industry will also need careful navigation of the tradeoff between safety and traffic jams. In early 2020, Moscow hosted a driverless vehicle competition. Shortly after the competition began, a vehicle stalled out at a traffic light. Human drivers would reason about this edge case and decide to just go around the stalled car. However, none of the driverless cars did that, and a three-hour traffic jam ensue[8]. We do not want AVs to crash but we also do not want them to stop and block traffic every time they encounter an edge case.
The Insurance Institute for Highway Safety analyzed 5,000 car accidents and found that, if AVs do not drive more slowly and cautiously than people, they will only prevent a third of all crashes [9]. If AV manufacturers program cars to drive more slowly, the result will be more cars on the road at any given point in time. This will increase the already too-high levels of congestion on many of our roads.
We will likely see some limited rollouts of AVs over the next ten years. Initially, they will be slow-moving vehicles with fixed routes on private land. They will likely progress to moderate speed vehicles with fixed routes on public roads. I find it hard to imagine that we will see significant city-based rollouts of autonomous taxis, but I would not rule out that possibility, especially if geographies are limited. However, due to the lack of commonsense reasoning in AVs, coupled with the seeming impossibility of anticipating every possible situation a vehicle might encounter, we probably will not see AVs dominating our highways and city streets for a long time.
Summary
Autonomous vehicle technology makes use of multiple types of AI technology including supervised learning, unsupervised learning, reinforcement learning, and natural language processing. However, each use of AI technology is for a very narrow task such as recognizing stop signs. The software that controls autonomous vehicles is conventionally coded. More importantly, the control software has no commonsense knowledge or reasoning capability, and this makes it difficult for autonomous vehicle manufacturers to handle edge cases. Without the ability to handle edge cases, it will be a long time before we see our highways and streets dominated by autonomous vehicles.
Steve Shwartz is a successful serial software entrepreneur and investor. He uses his unique perspective as an early AI researcher and statistician to both explain how AI works in simple terms, to explain why people shouldn’t worry about intelligent robots taking over the world, and to explain the steps we need to take as a society to minimize the negative impacts of AI and maximize the positive impacts. Learn more about Steve Shwartz at AIPerspectives.com and connect with him on Twitter, Facebook and LinkedIn.
References
-
[1] C. Sullengerger. Sully: My Search for What Really Matters. New York: HarperCollins. 2016.
- [2] R. Nazarov, “Russian wake-up call from winter autonomous-vehicle (AV) trials,” Urgent Communications, February 18, 2020. https://urgentcomm.com/2020/02/18/russian-wake-up-call-from-winter-autonomous-vehicle-av-trials/
- [3] D. Newcomb, “Don’t believe the self-driving car crash hype,” PC Mag, March 31, 2017.
https://www.pcmag.com/opinions/dont-believe-the-self-driving-car-crash-hype - [4] https://www.foxnews.com/auto/florida-mayo-clinic-autonomous-vehicles-coronavirus
- [5] A. J. Hawkins, “Waymo’s driverless car: Ghost-riding in the back seat of a robot taxi,” The Verge, December 9, 2019. https://www.theverge.com/2019/12/9/21000085/waymo-fully-driverless-car-self-driving-ride-hail-service-phoenix-arizona
- [6] https://waymo.com/journey/
- [7] https://venturebeat.com/2020/04/17/watch-zooxs-autonomous-car-drive-around-san-francisco-for-an-hour/
- [8] R. Nazarov, “Russian wake-up call from winter autonomous-vehicle (AV) trials,” Urgent Communications, February 18, 2020. https://urgentcomm.com/2020/02/18/russian-wake-up-call-from-winter-autonomous-vehicle-av-trials/
- [9] https://www.iihs.org/news/detail/self-driving-vehicles-could-struggle-to-eliminate-most-crashes


